Testing of the active exoskeleton
The leg replica was used to evaluate the active H3 exoskeleton in the shown setup.

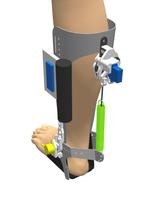
Testing of the passive knee orthosis
The leg replica was used to evaluate the passive knee orthosis and mounted on a stand.
12 x 10

Early stage of the leg replica design
The picture shows the lower leg of the leg replica in the early stages of the development.

Leg replica without surface shells
The surface shells were removed to show the leg internals.

Leg replica
This image shows the assembled leg replica.

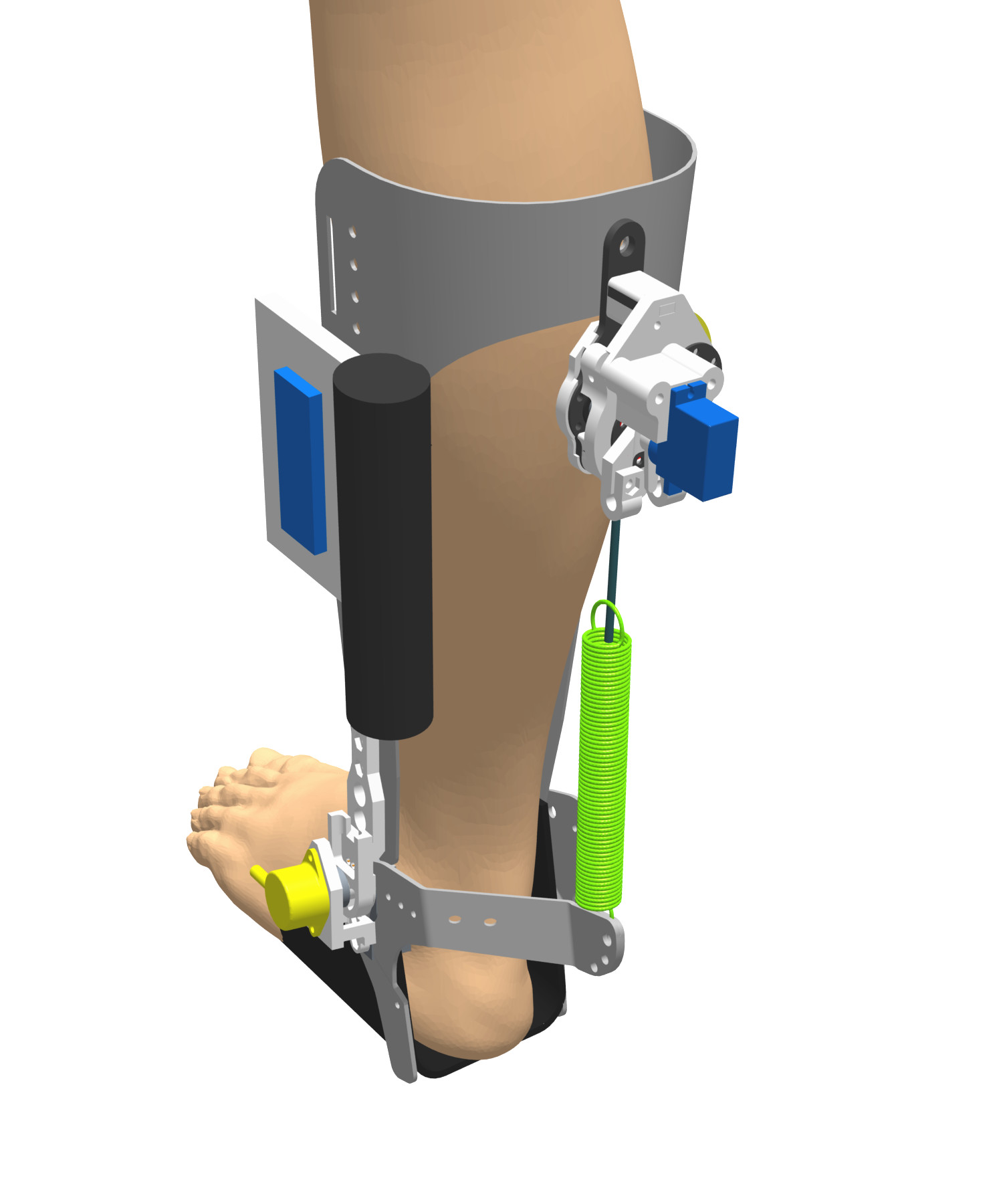
Ankle Exoskeleton Ver. 2
The quasi-passive prototype of the ankle exoskeleton.
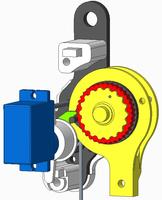
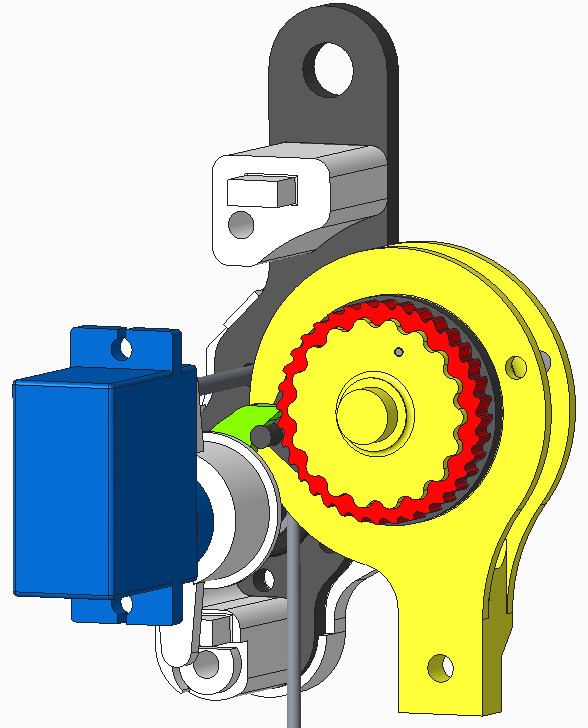
Clutch modification
The clutch CAD model of the quasi-passive exoskeleton.

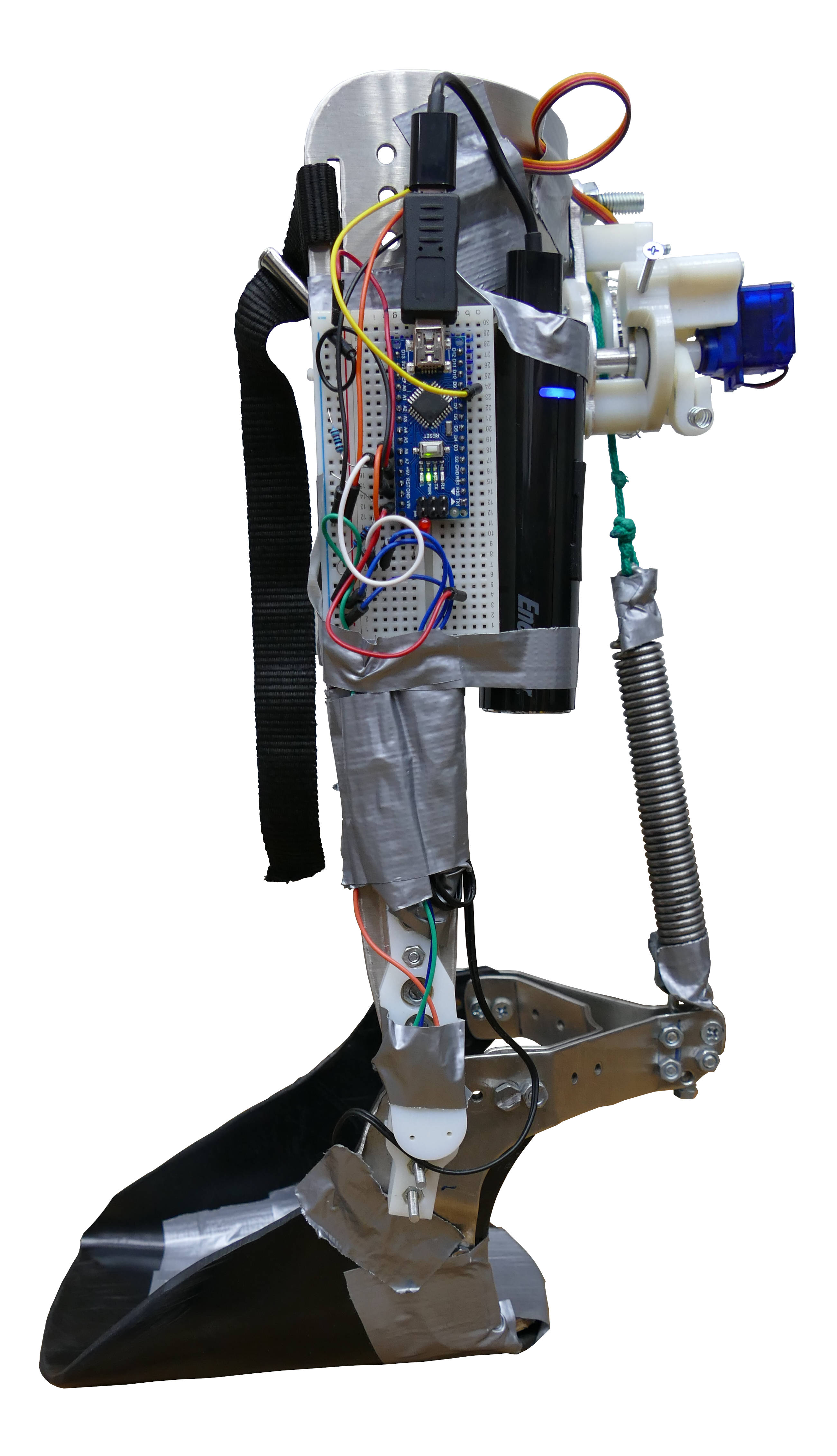
Ankle Exoskeleton Ver. 1
The first version of the ankle exoskeleton. This one is completely
passive.

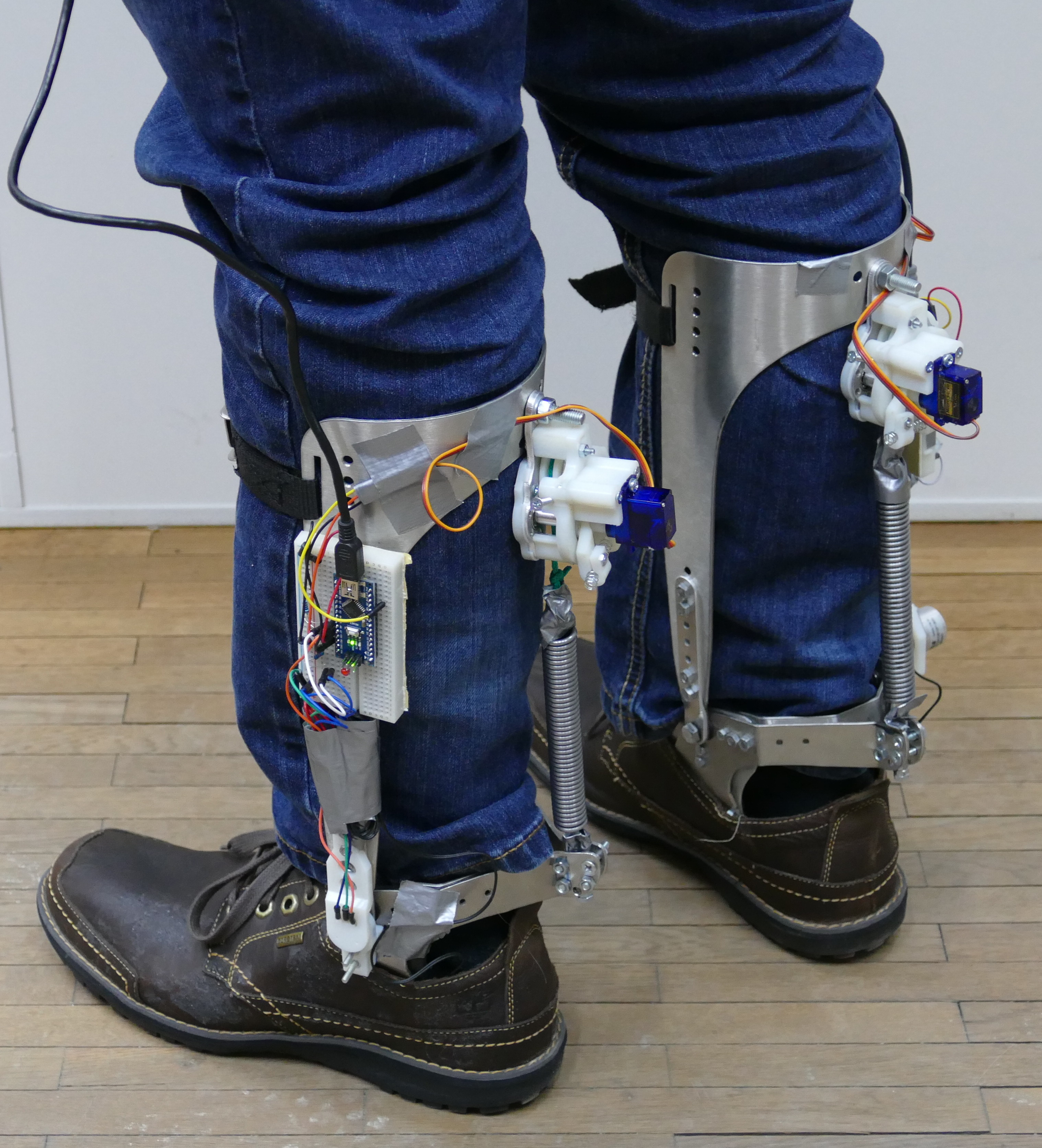
Quasi-passive exoskeleton
snapshot
Both the left and right variants of the quasi-passive
exoskeleton are in this picture.

Quasi-passive exoskeleton
snapshot with muscle view
The calf muscles are exposed in this
snapshot. The exoskeleton reduces the effort on the calf muscles.

Testing of the passive ankle
exoskeleton
A snapshot of the experimental evaluation of the
quasi-passive exoskeleton.
Quasi-passive exoskeleton
CAD
A view of the CAD of the quasi-passive exoskeleton.

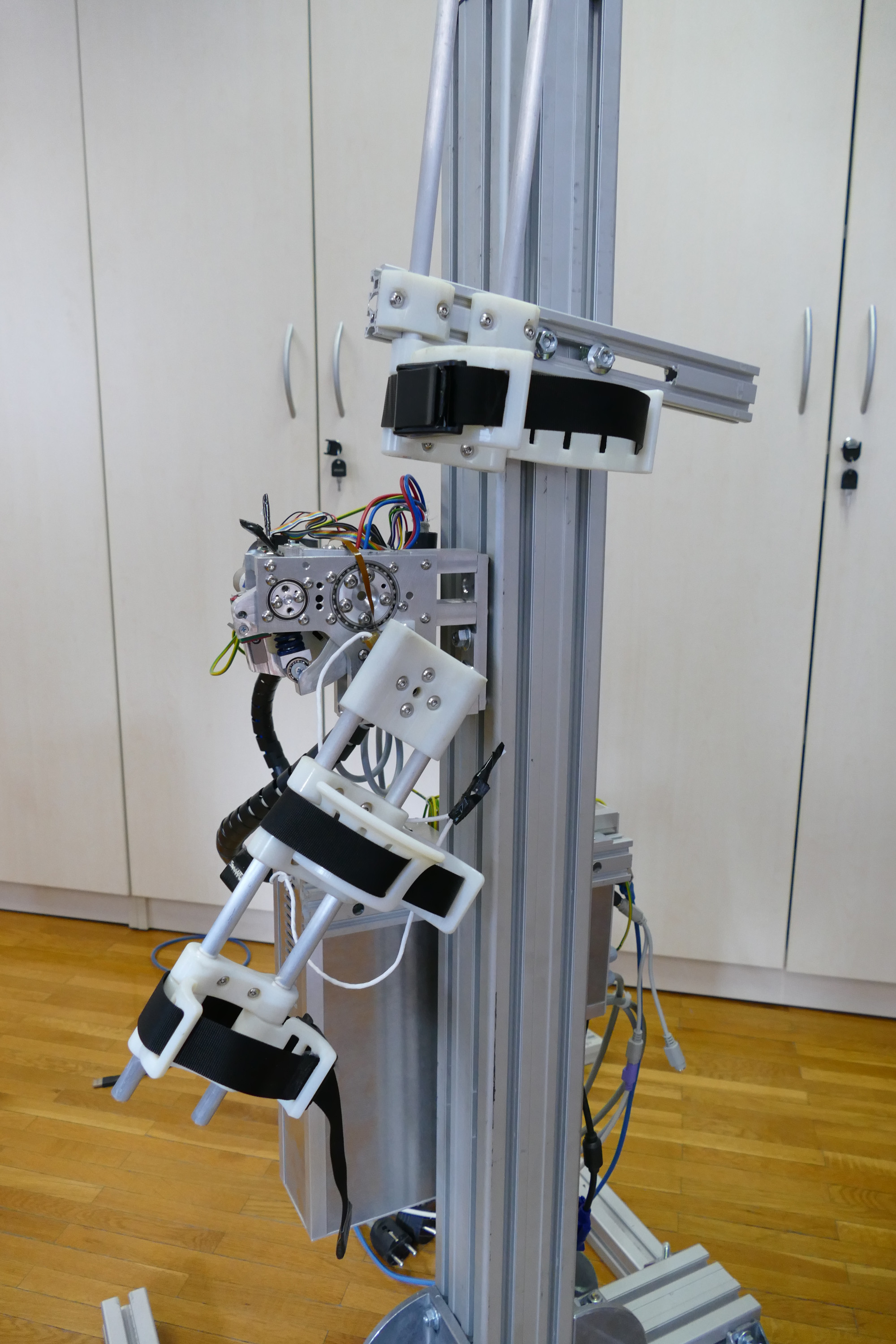
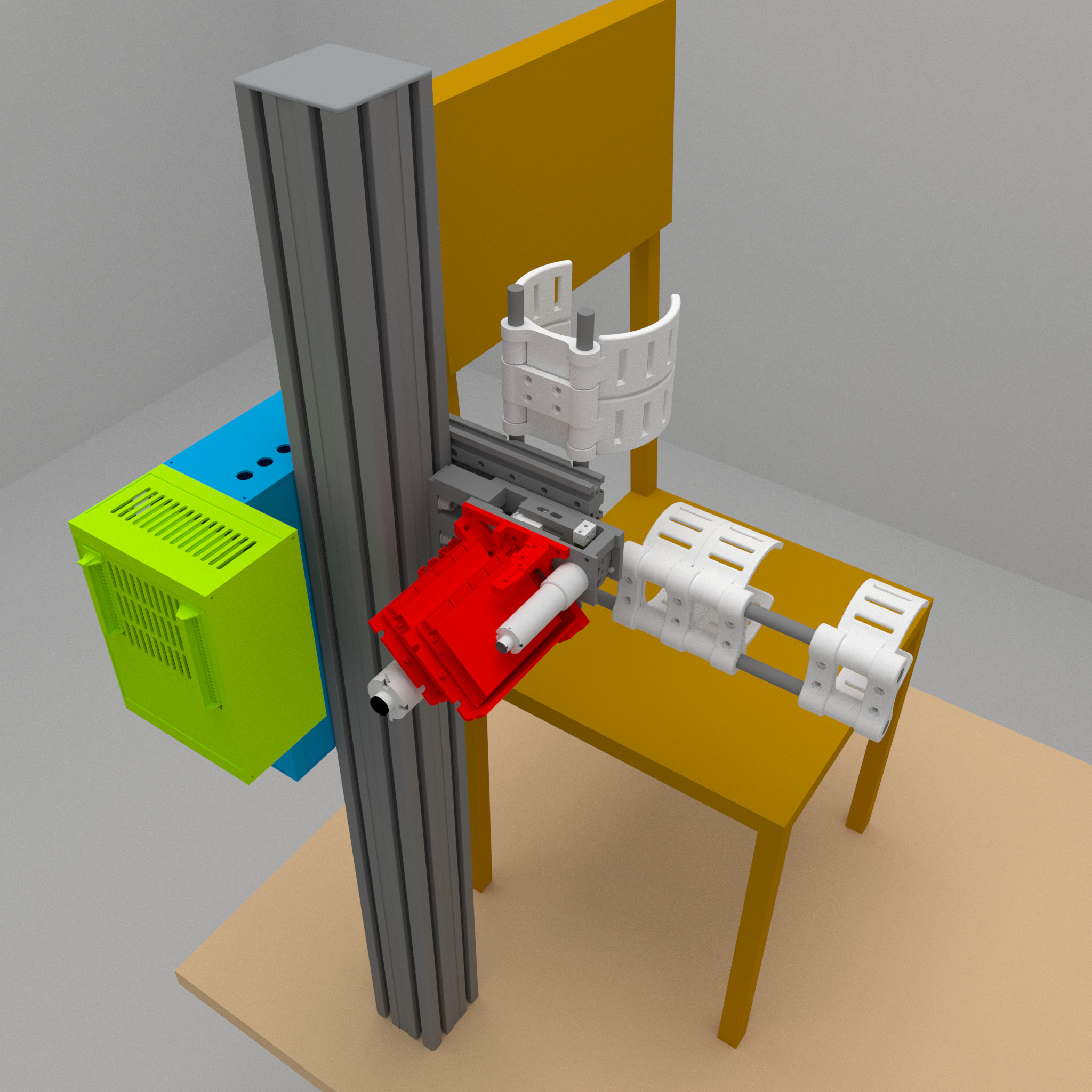
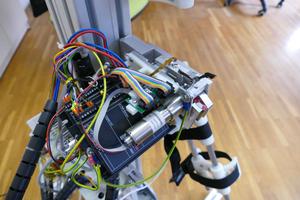
Elbow exoskeleton prototype
snapshot

Attaching the elbow
exoskeleton
The exoskeleton uses a simple double rod mechanism which
allows manual adjustmens of the attachment points along the arm.

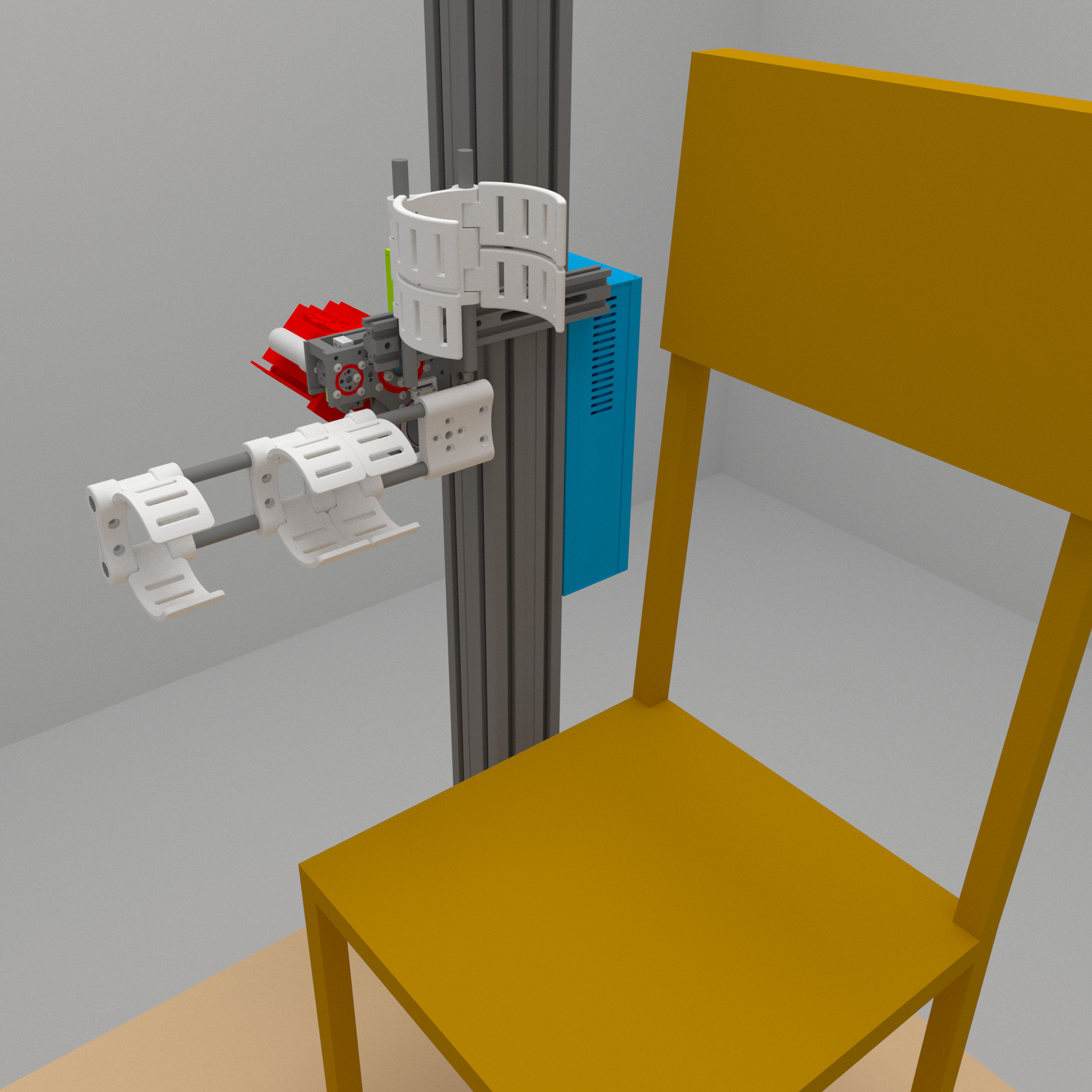
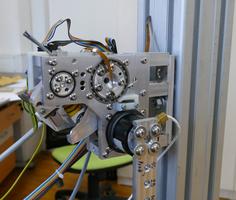
Miha tests the elbow
exoskeleton
A close up of the elbow
exoskeleton prototype

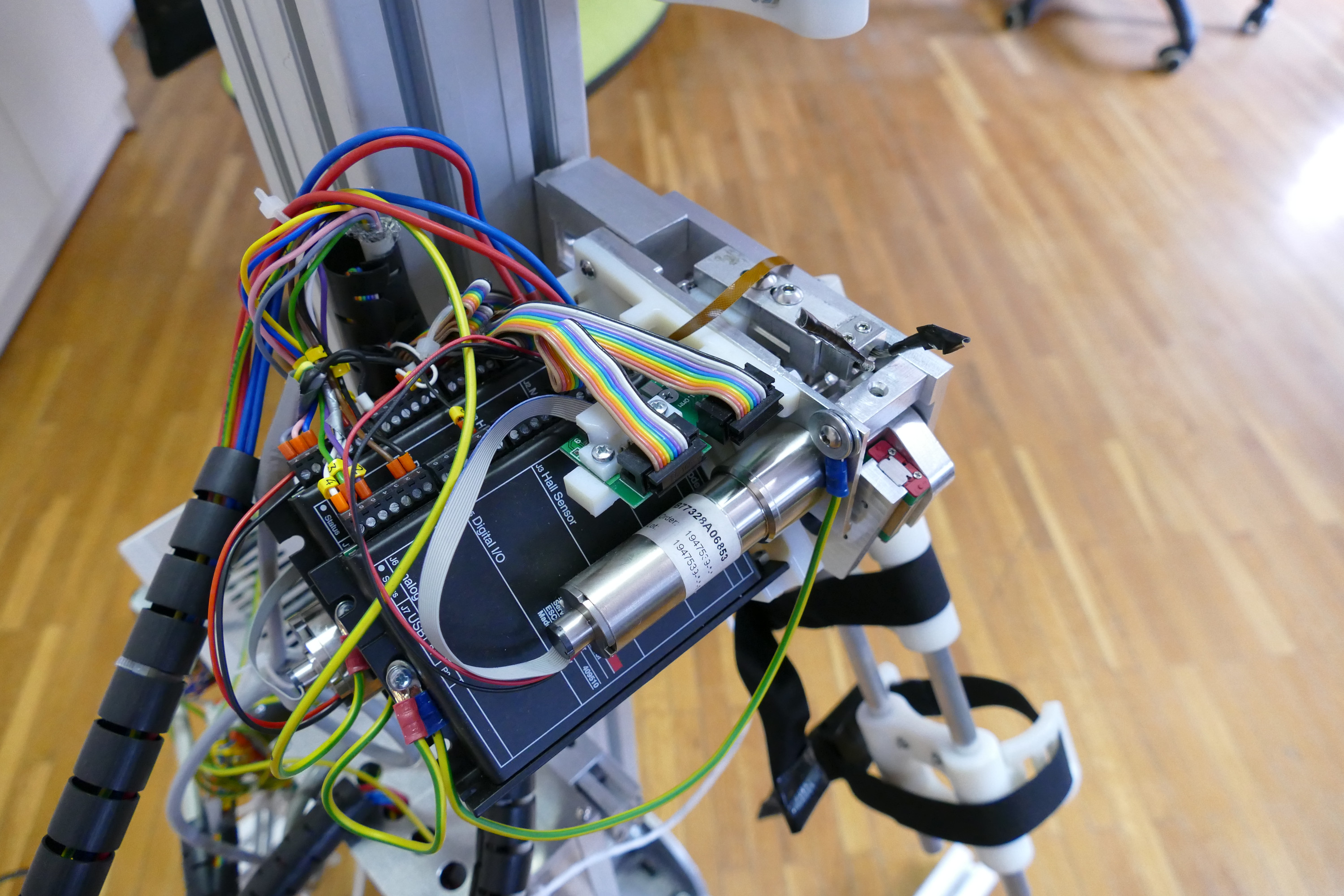
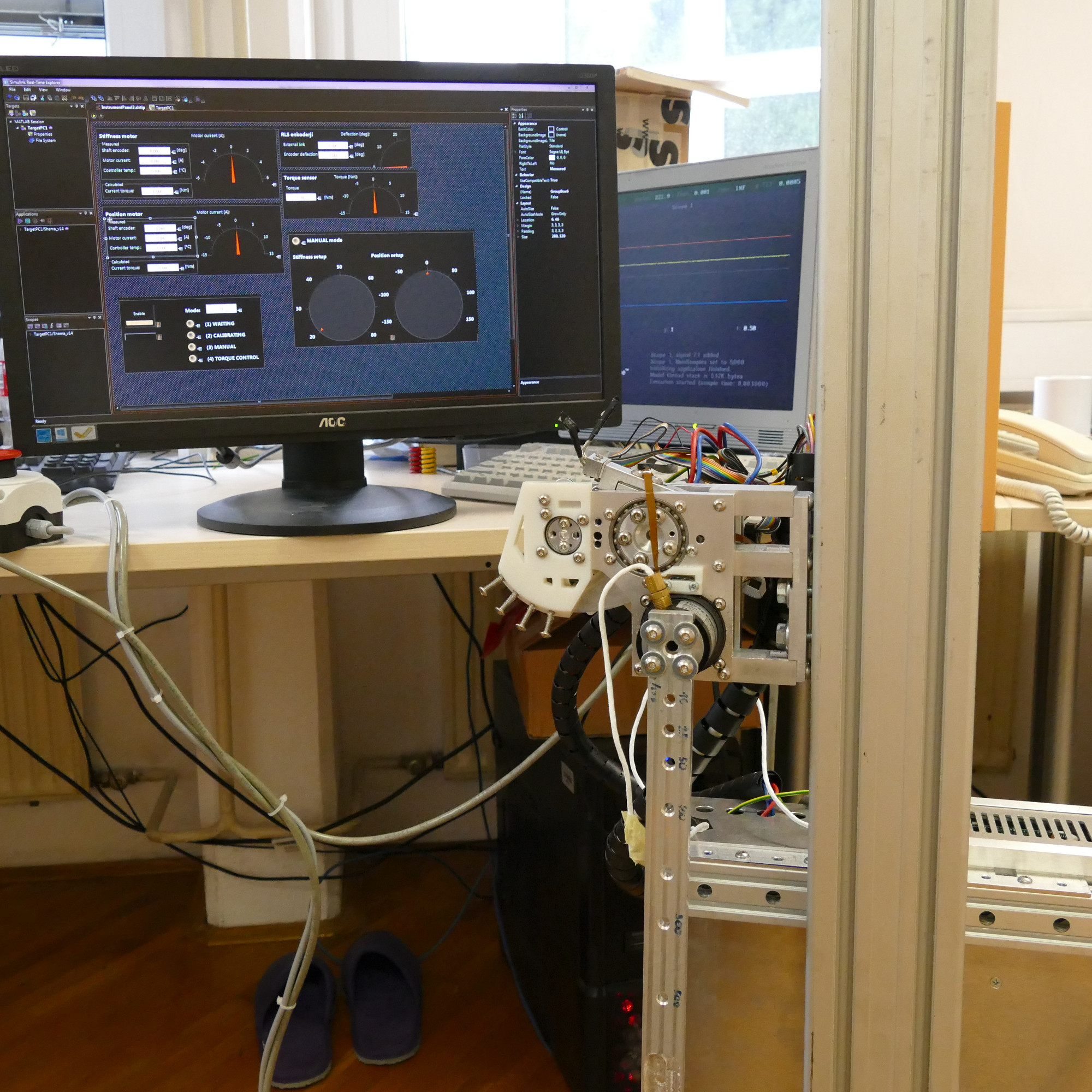
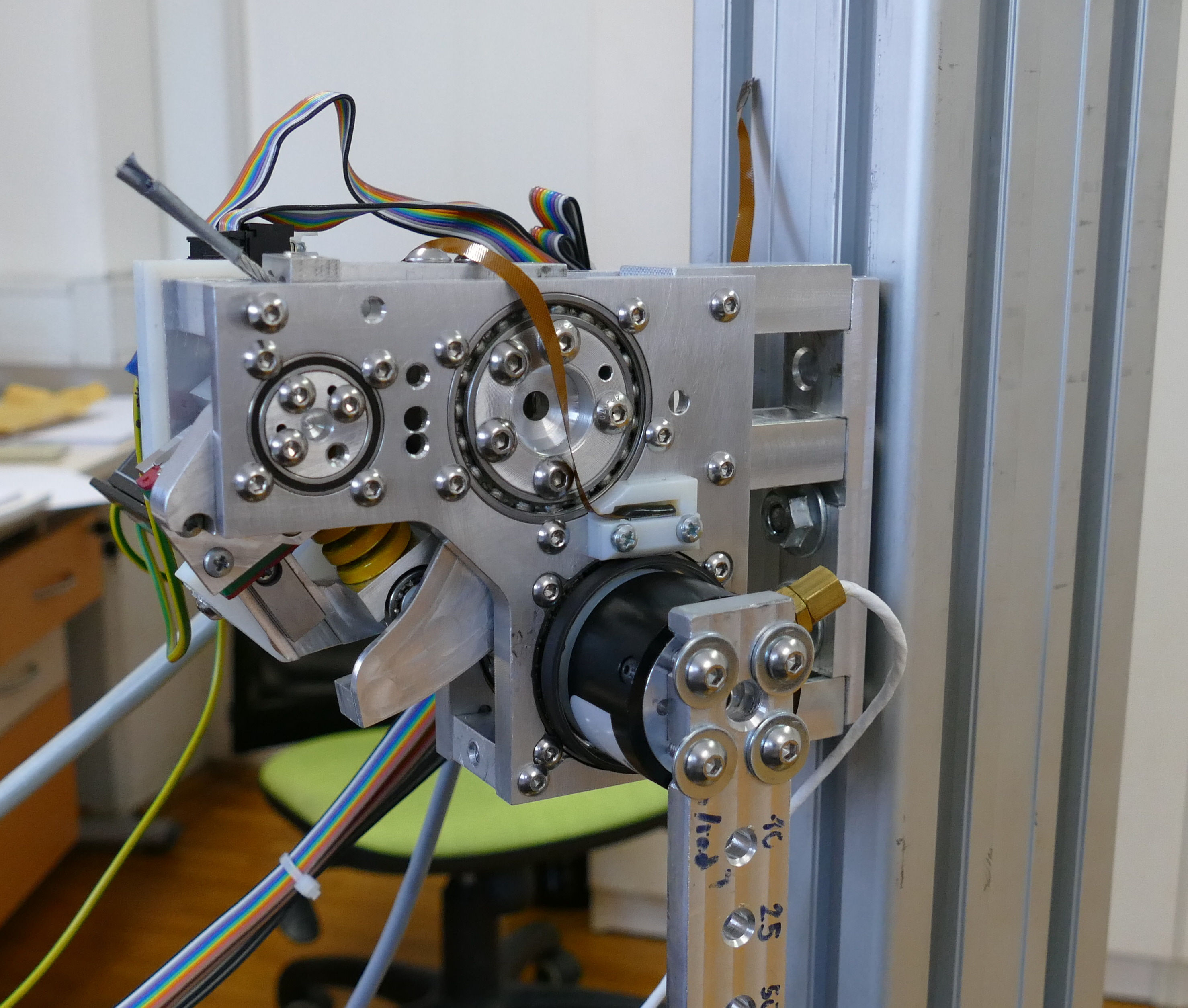
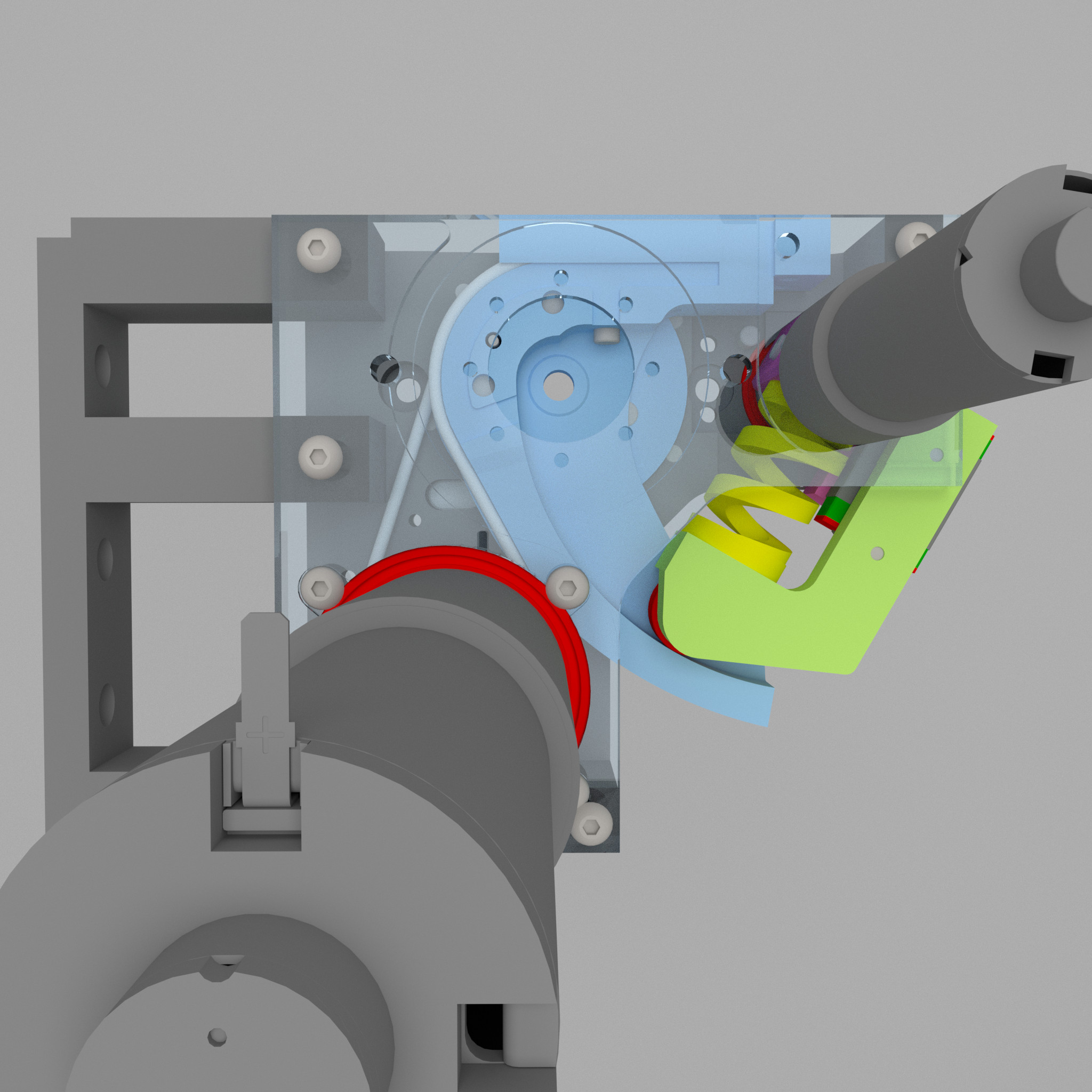
Some early VSA experiments
Another close up of the
elbow exoskeleton prototype
Render of the elbow
exoskeleton
Another render of the elbow
exoskeleton
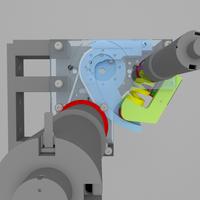
A close up of the VSA
mechanism

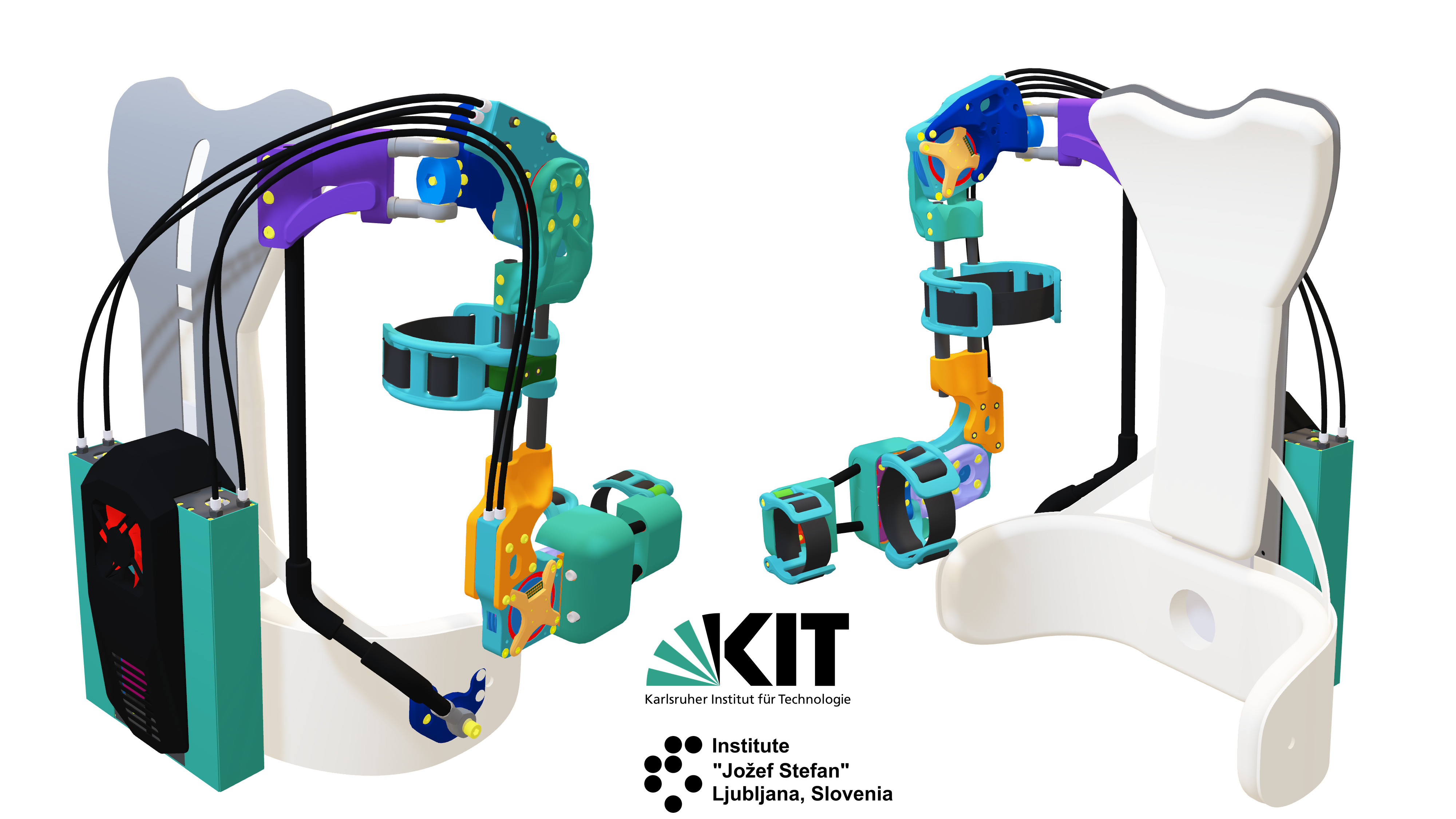
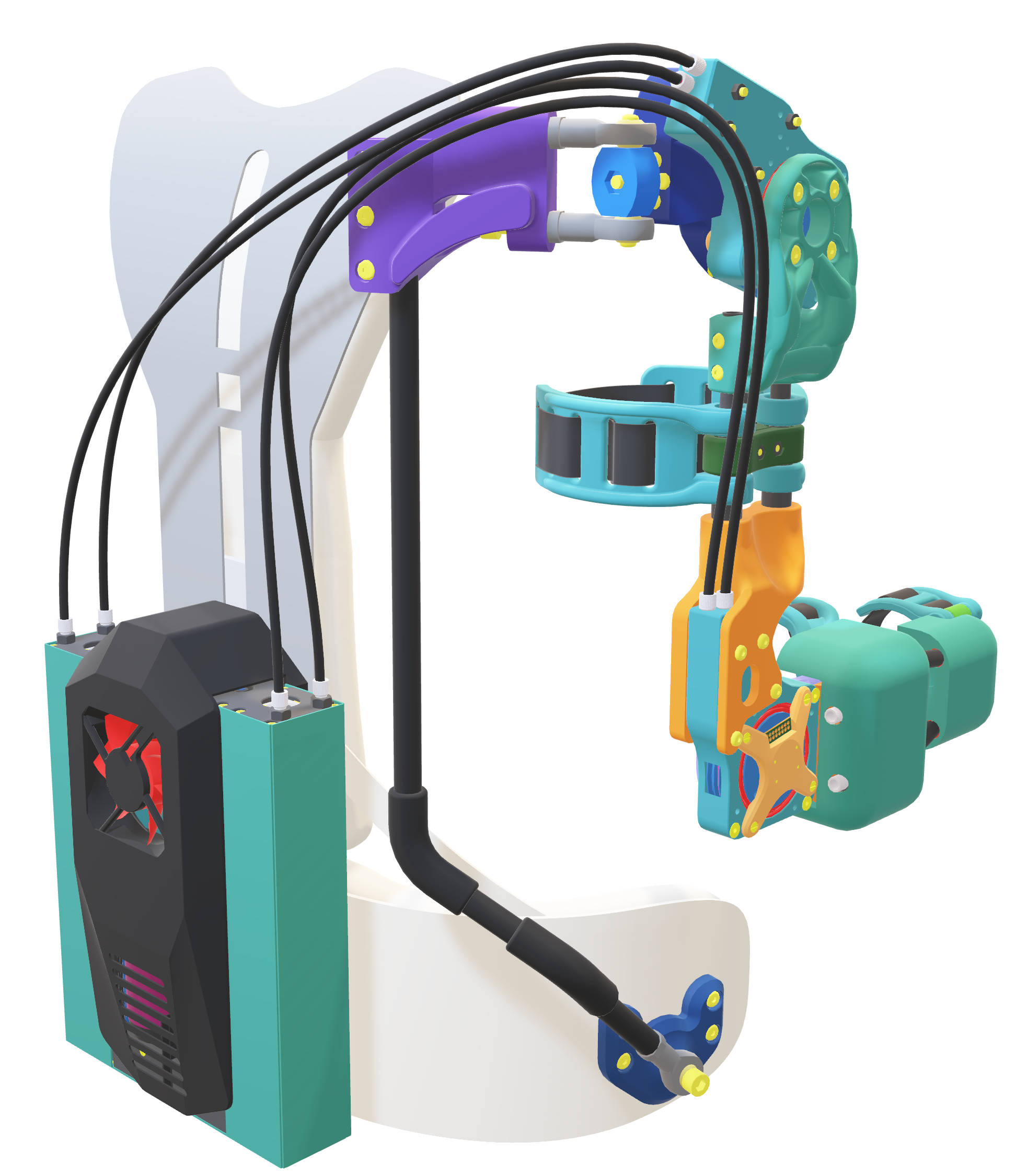
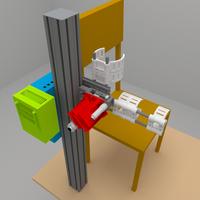
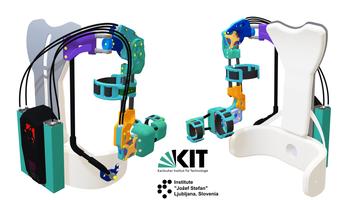
A render of the UpperLimb
exoskeleton
The renders are based on the CAD model

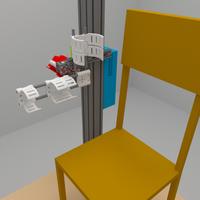
Another render of the
UpperLimb exoskeleton
The renders are based on the CAD model
Another render of the
UpperLimb exoskeleton
The renders are based on the CAD model

Another render of the
UpperLimb exoskeleton
The renders are based on the CAD model
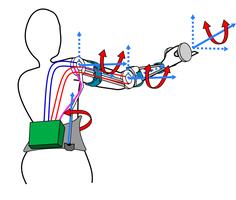
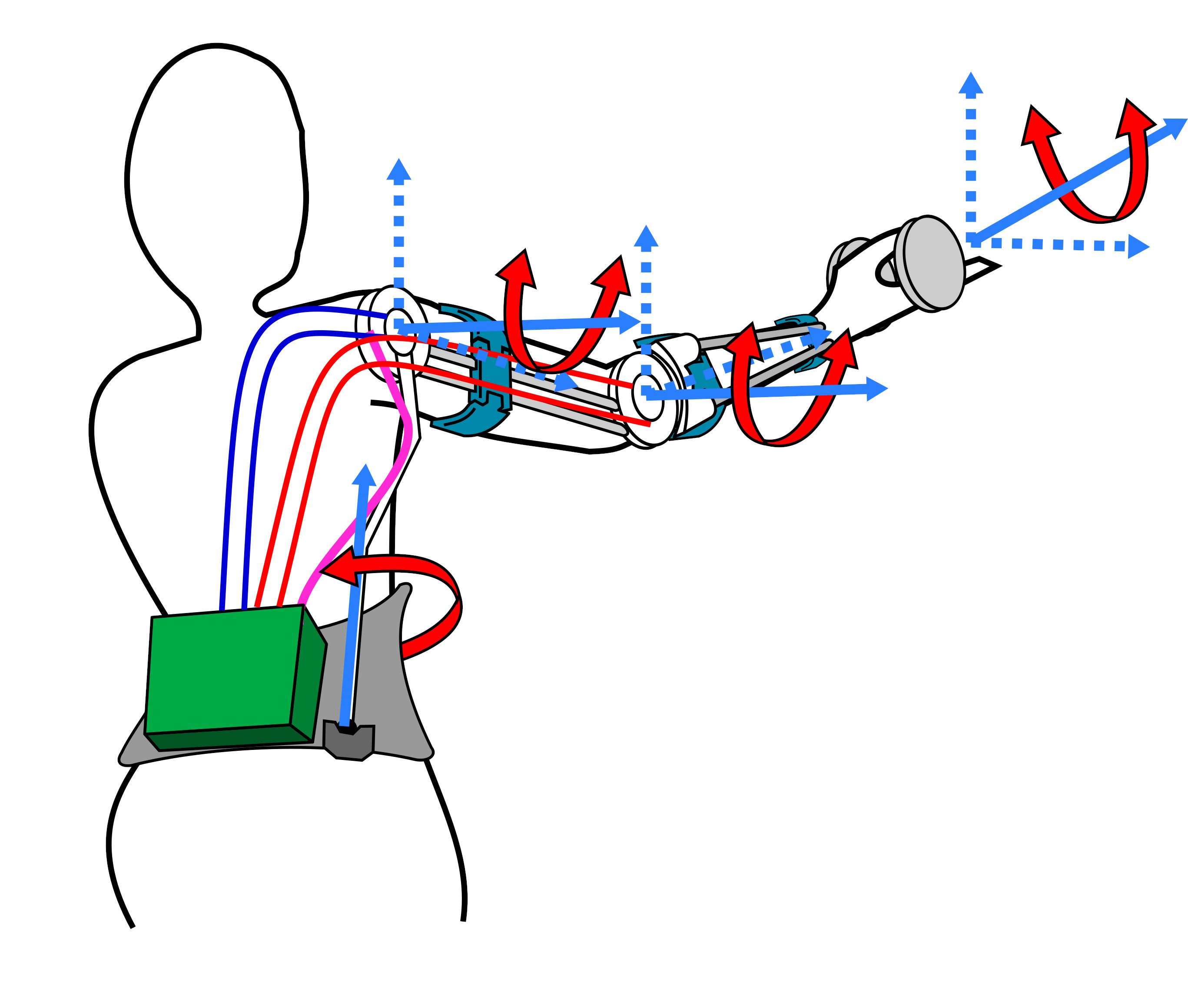
UpperLimb exoskeleton sketch
Initial sketch of the upper limb exoskeleton

UpperLimb exoskeleton
prototype snapshot
One of the first pictures of the exoskeleton
prototype